
 Bài giảng Cơ học máy - Chương 15: Ổ trượt - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 15: Ổ trượt - Phan Tấn Tùng5. Nguyên lý bội trơn thuỷ động Dầu bị cuốn vào khe hẹp nên tăng áp sấut cân bằng với tải trọng tác động lên ngõng trục Điều kiện thực hiện bôi trơn thuỷ động •Có khe hở hình nêm (chêm dầu) •Có vận tốc đủ lớn •Dầu có độ nhớt
 10 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 483 | Lượt tải: 1
10 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 483 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 14: Ổ lăn - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 14: Ổ lăn - Phan Tấn Tùng9. Trình tự lựa chọn ổ lăn Thông số biết trước: sơ đồ tính toán, số vòng quay của ổ, đường kính vòng trong d, điều kiện làm việc, thời gian làm việc (Lh – giờ). Khi tính ổ lăn chì tính cho ổ chịu lực lớn nhất, ổ cón lại chọn cùng ký hiệu với ổ chịu lực lớn nhất. 1. Tính lực hướng tâm và dọc trục tác động lên ổ (xem phần tính trục) 2. Chọn các...
25 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 561 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 13: Trục - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 13: Trục - Phan Tấn Tùng7. Trình tự thiết kế 1. Chọn vật liệu 2. Xác định lực tác động lên trục 3. Xác định kích thước chiều dài trục 4. Tính chính xác trục theo chỉ tiêu sức bền 5. Kiểm nghiệm trục theo hệ số an toàn 6. Vẽ kết cấu trục 7. Kiểm tra độ cứng trục cho các trục quan trọng
10 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 540 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 11: Bộ truyền xích - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 11: Bộ truyền xích - Phan Tấn Tùng7. Trình tự thiết kế bộ truyền xích Thông số ban đầu: cộng suất P1 (kW), số vòng quay n1 (vg/ph), tỉ số truyền u, điều kiện làm việc. 1. Chọn loại xích (ống con lăn, răng) dựa vào công suất, vận tốc, điều kiện làm việc 2. Chọn số răng Z1 (nên chọn Z1 là số lẽ đề mòn đều) 3. Tính Z 2 và kiểm tra Z2 < Zmax. Tính lại chính xác tỉ số truyền 4. ...
18 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 532 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 10: Bộ truyền đai - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 10: Bộ truyền đai - Phan Tấn Tùng3. Chọn hệ số trượt ξ và tính d2 (làm tròn theo dãy số tiêu chuẩn – trang 153). Tính chính xác u. 4. Xác định khoảng cách trục a theo kết cấu hoặc bảng (trang 153) 5. Tính góc ôm đai 6.Tính số dây đai Z 7. Chọn bề rộng bánh đai 8. Xác định lực tác động lên trục
26 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 853 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 7: Khái niệm cơ bản về tính toán thiết kế chi tiết máy - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 7: Khái niệm cơ bản về tính toán thiết kế chi tiết máy - Phan Tấn Tùng4. Độ chịu nhiệt Là khả năng làm việc ổn định của chi tiết ở nhiệt độ làm việc 5. Độ ổn định dao động Biên độ dao động ở tần số làm việc phải nhỏ hơn giá trị cho phép Thường có 2 chế độ: dưới cộng hưởng và trên cộng hưởng 6. Độ tin cậy Là xác suất không hỏng của chi tiết khi vận hành 7. Thiết kế tối ưu Chọn hàm mục tiêu và các ràng buộc để ...
18 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 531 | Lượt tải: 1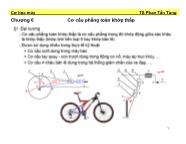 Bài giảng Cơ học máy - Chương 6: Cơ cấu phẳng toàn khớp thấp - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 6: Cơ cấu phẳng toàn khớp thấp - Phan Tấn Tùng(Bản scan) 83, Đặc điểm động học Cơ câu 4 khâu bản lề 1. Tỉ số truyền - Đặc điểm động học cơ cấu 4 khâu bản lề + Khi tay quay AB và thanh truyền BC duỗi thẳng hay dập nhau, tức P = 4, khâu 3 đang ở vị trí biên và chuẩn bị đổi chiều quay
15 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 520 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 5: Phân tích lực cơ cấu - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 5: Phân tích lực cơ cấu - Phan Tấn Tùng(Bản scan) 54. Tính lực trên khâu dẫn 2, Phương pháp di chuyển khả dĩ - Moment (lực) cân bằng trên khâu dẫn là moment (lực) cân bằng tất cả các lực (kể cả lực quán tínnh) tác dụng lên Cơ cấu • tổng công suất tức thời của tất cả các lực tác dụng lên cơ cấu bằng không - Theo nguyên lý di chuyển khả dĩ
10 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 500 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 4: Phân tích động học cơ cấu - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 4: Phân tích động học cơ cấu - Phan Tấn TùngNgoài ra còn một số phương pháp khác như phương pháp ma trận, phương pháp tâm vận tốc tức thời. • Trong chương trình này chỉ tập trung vào phương pháp đồ thị và phương pháp họa đồ véc tơ. Các phương pháp này dựa trên phương pháp vẽ theo tỉ lệ xích để giải bài toán động học cơ cấu.
11 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 517 | Lượt tải: 1 Bài giảng Cơ học máy - Chương 2: Cơ sở tính toán theo độ bền và độ cứng - Phan Tấn Tùng
Bài giảng Cơ học máy - Chương 2: Cơ sở tính toán theo độ bền và độ cứng - Phan Tấn Tùng5.4.4 Thuyết bền: Trong thực tế chỉ xác định được ứng suất cho phép ở trạng thái ứng suất đơn. Ở trạng thái ứng suất phức tạp, phải qui đổi về trang thái ứng suất đơn để kiểm tra bền. Có 5 thuyết bền đưa ra giả thuyết về cách qui đổi từ trạng thái ứng suất phức tạp về trạng thái ứng suất đơn. Trong đó ta chỉ xét đến thuyết bền 4. Trạng thái ...
28 trang | Chia sẻ: linhmy2pp | Ngày: 18/03/2022 | Lượt xem: 694 | Lượt tải: 1

